TEMAS DESARROLLADOS EN LOS ENCUENTROS
Tema 1 - Presentación e Inducción semillero INEM - FUMC
Tema 2 - Partes de un Robot
Tema 3 - El robot seguidor de linea
Tema 4 - Introducción a la simulación en Proteus y S4A
Tema 5 - Simulación del sensor en Proteus y S4A
Tema 6 - Funcionamiento de los motores de un robot en S4A
Tema 7:
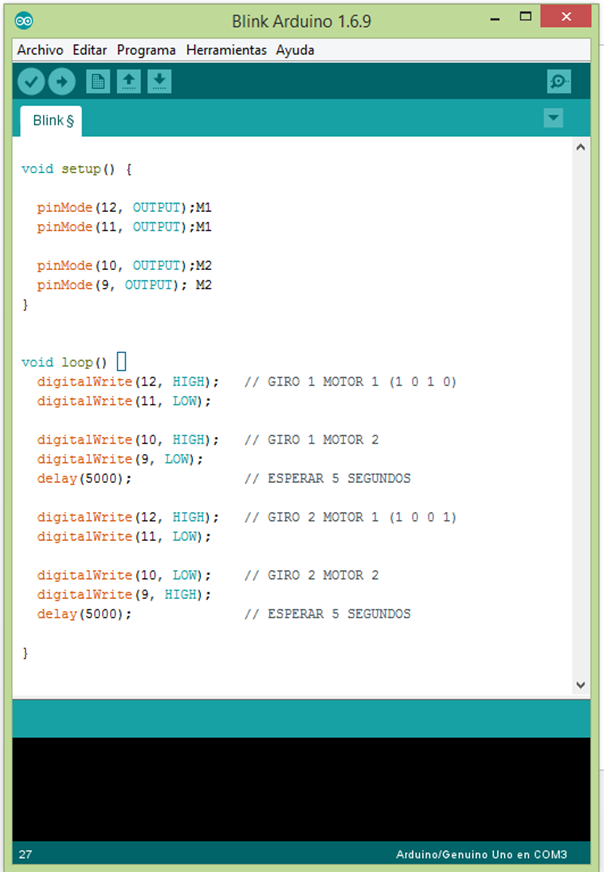
Programa para mover el robot en Arduino.
PRIMER MOVIMIENTO DEL ROBOT
void setup() {
pinMode(12, OUTPUT);M1
pinMode(11, OUTPUT);M1
pinMode(10, OUTPUT);M2
pinMode(9, OUTPUT); M2
}
void loop() {
digitalWrite(12, HIGH); // GIRO 1 MOTOR 1 (1 0 1 0)
digitalWrite(11, LOW);
digitalWrite(10, HIGH); // GIRO 1 MOTOR 2
digitalWrite(9, LOW);
delay(5000); // ESPERAR 5 SEGUNDOS
digitalWrite(12, HIGH); // GIRO 2 MOTOR 1 (1 0 0 1)
digitalWrite(11, LOW);
digitalWrite(10, LOW); // GIRO 2 MOTOR 2
digitalWrite(9, HIGH);
delay(5000); // ESPERAR 5 SEGUNDOS
}
void setup() {
pinMode(12, OUTPUT);M1
pinMode(11, OUTPUT);M1
pinMode(10, OUTPUT);M2
pinMode(9, OUTPUT); M2
}
void loop() {
digitalWrite(12, HIGH); // GIRO 1 MOTOR 1 (1 0 1 0)
digitalWrite(11, LOW);
digitalWrite(10, HIGH); // GIRO 1 MOTOR 2
digitalWrite(9, LOW);
delay(5000); // ESPERAR 5 SEGUNDOS
digitalWrite(12, HIGH); // GIRO 2 MOTOR 1 (1 0 0 1)
digitalWrite(11, LOW);
digitalWrite(10, LOW); // GIRO 2 MOTOR 2
digitalWrite(9, HIGH);
delay(5000); // ESPERAR 5 SEGUNDOS
}
| primer_movimiento_del_robot.docx |
